МТОТО
ROB-77199Добрый день, организаторы соревнований!
Наша команда МТОТО в этом году приняла решение первый раз поучаствовать в "Практической олимпиаде по робототехнике: ARDUINO" на любимом Робофинист 2024г.
Роббот собран на платформе ScratchDuino Ардуино в роли управляющего мкК.
Роль кубиков исполнили коробки от спичек - светлая сторона = белый, коричневая сторона = черный. Их размеры более 30*30*30 мм.

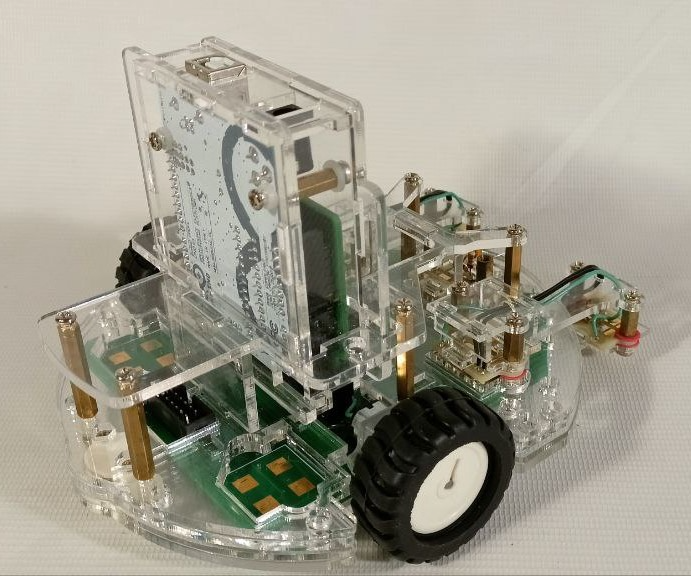
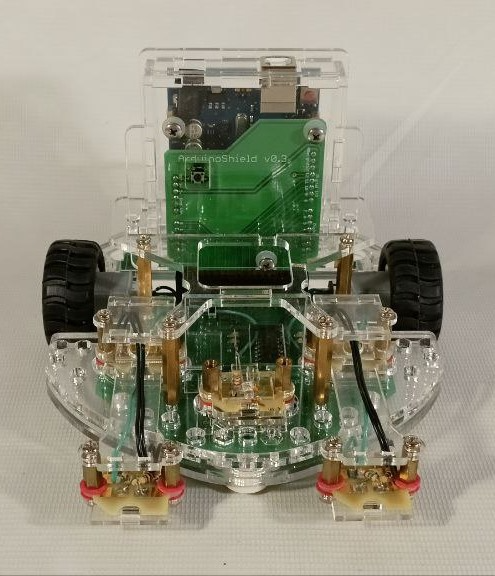
Коробка с этим конструктором за ненужностью давно пылилась на самой дальней полке. Прошло 7 лет и вот ее звездный час настал. Пластины корпуса вырезаны из оргстекла, внешние размеры менее 200*200 мм, два двигателя N20 Mini микро-металлическая передача. Из набора датчиков рожденных сотрудниками производителя РОББО, на магнитных контактах мы установили 2 датчика линии и датчик определения цвета.
Датчик цвета установлен глубоко на корпусе роббота, поэтому ему трудно справляется с этой обязанностью, он отдален от объекта исследования.
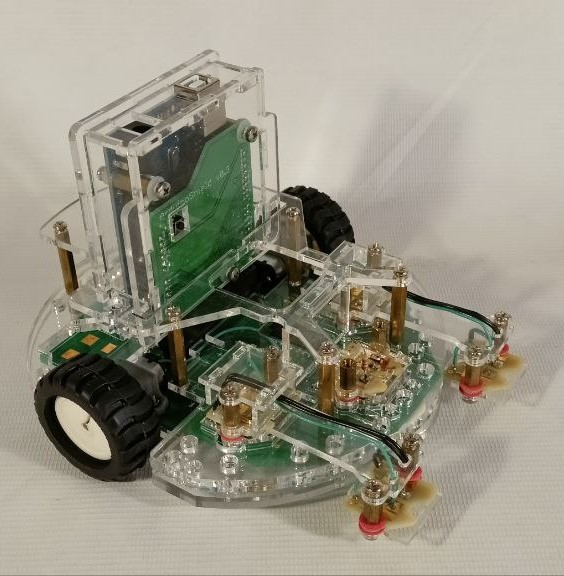
Чтобы цвет кубиков определялся точно нашим участником собственноручно, к датчику Роббо, через резистор был напаян дополнительный яркий светодиод - позволяющий освещать предметы и определять цвет кубика без ошибок.
Результат переделки датчика.
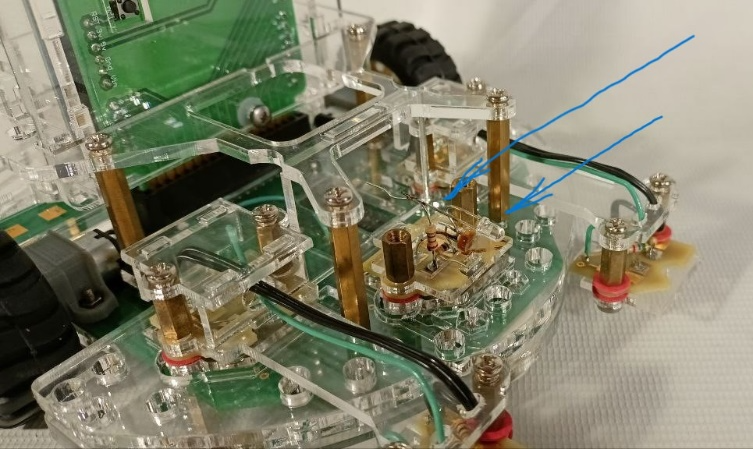
Подсветка в действии.

Алгоритм решения задачи:
В рамках поставленной задачи нужно проехать по полю, на каждом перекрестке подъехать к "полке", и вытолкнуть кубик с нее, если он белого цвета, и проигнорировать, если он черный. Для этого на каждом перекрестке, который робот встречает, он разворачивается на 90 градусов, и едет до обнаружения второго перекрестка - полки. Там он останавливается и с помощью датчика освещенности, построенного на фоторезисторе, подключенном к аналоговому порту Arduino, и постоянно светящегося светодиода, определяет цвет расположенного перед ним кубика. В случае, если кубок белый, он его выталкивает
Эти действия робот повторяет 6 раз - по количеству перекрестков на полигоне. Далее он направляется к зоне финиша, въезжает в нее и останавливается. Роббот действует автономно. Задание выполнено.
Уникальность робота в том , что:
- после долгого нахождения в коробке мы смогли найти ему задачу для исполнения, оживить его и запустить
- была устранена ошибка проектировщиков этой поделки - исправлен датчик - добавлен светодиод , который позволил выполнять робботу свои функции.
Файлы
Добавлен 20.11.2024