РЖД
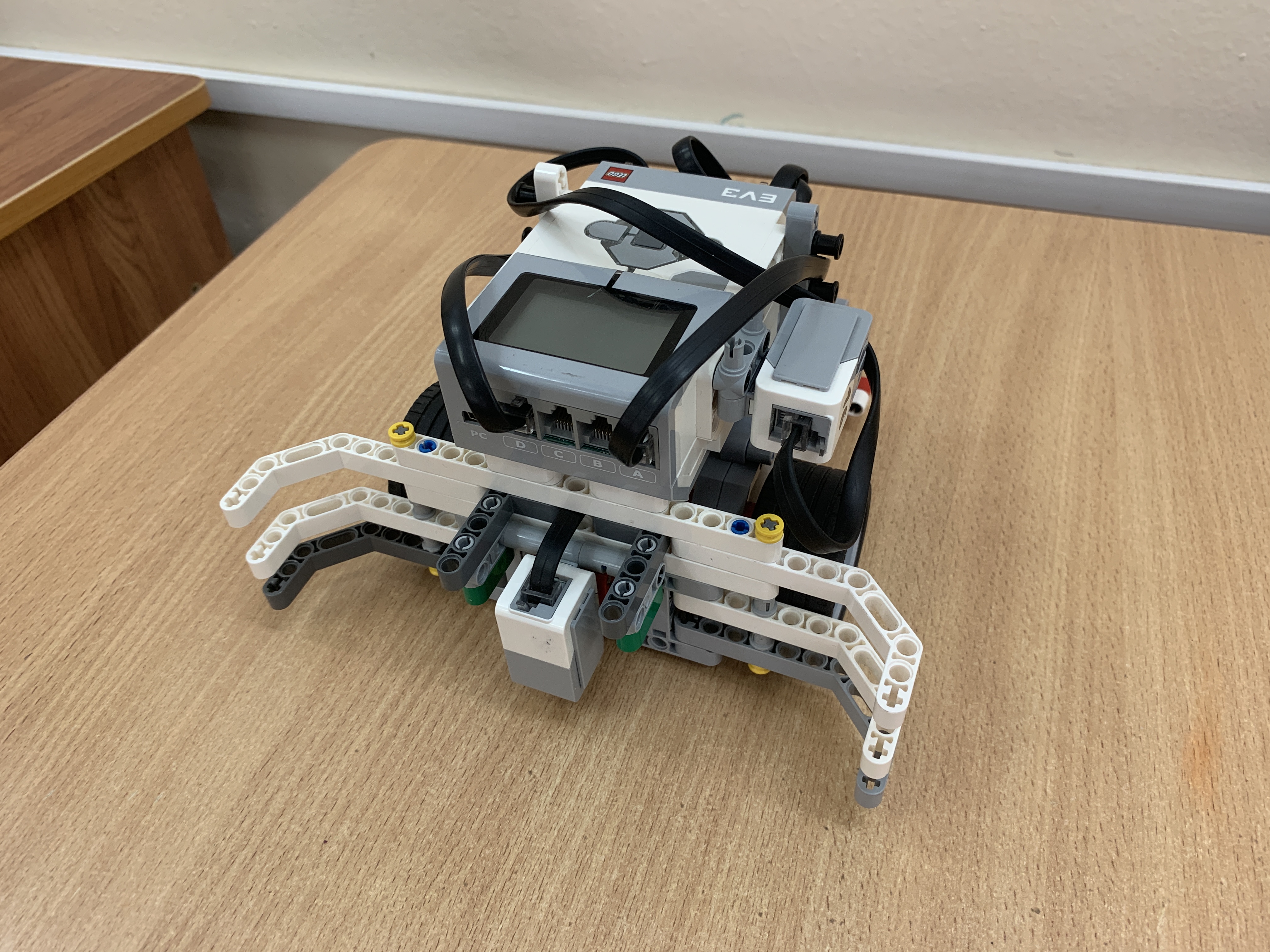
ROB-56916Робот РЖД - 1 спроектирован, а после сконструирован на базе конструктора Lego EV3. На роботе РЖД - 1 установлен датчик цвета (освещенности), он нужен для движения робота по черной линии (а значит, определения себя в пространстве. Так же для этой цели на роботе РЖД - 1 установлен датчик наклона (также известный как гироскоп), позволяющий определять положение робота относительно плоскости поля, а значит дающий роботу понять находится ли он на пандусе или нет). Робот РЖД - 1 оснащен неподвидным ковшом, способным захватывать мелкие объекты и тащить их с собой по ходу движения робота. Также робот РЖД - 1 имеет два больших мотора для быстрого и маневренного перемещения по полю. Робот РЖД - 1 создан в целях выполнения определенных целей и задач в категории РобоСпорт. Теннис автономных роботов (открытая).
В дополнение фото и описание второго робота РЖД - 2.
Робот РЖД - 2 спроектирован, а после сконструирован на базе конструктора Lego EV3. На роботе РЖД - 2 установлены два датчика цвета (освещенности) для более точной ориентации на поле, чем при использовании одного датчика цвета (освещенности), позволяющего определять цвет (или уровень освещенности) покрытия, а значит ориентироваться в пространстве. Использованы два средних мотора (в целях экономии драгоценного пространства) для мощного и уверенного перемещения робота по полю и два больших мотора для поднятия и опускания переднего "лифтового" механизма, занимающего всю допустимую длину для большей эффективности захвата разного рода мелких объектов и их последующего поднятия в целях перебрасывания через стену. Робот РЖД - 2 создан для выполнения определенных целей и задач, в категории РобоСпорт. Теннис автономных роботов (открытая).
Дополнительные файлы
{kind=link}
Добавлен 20.11.2024
{kind=link}
Добавлен 20.11.2024