SAPSAN
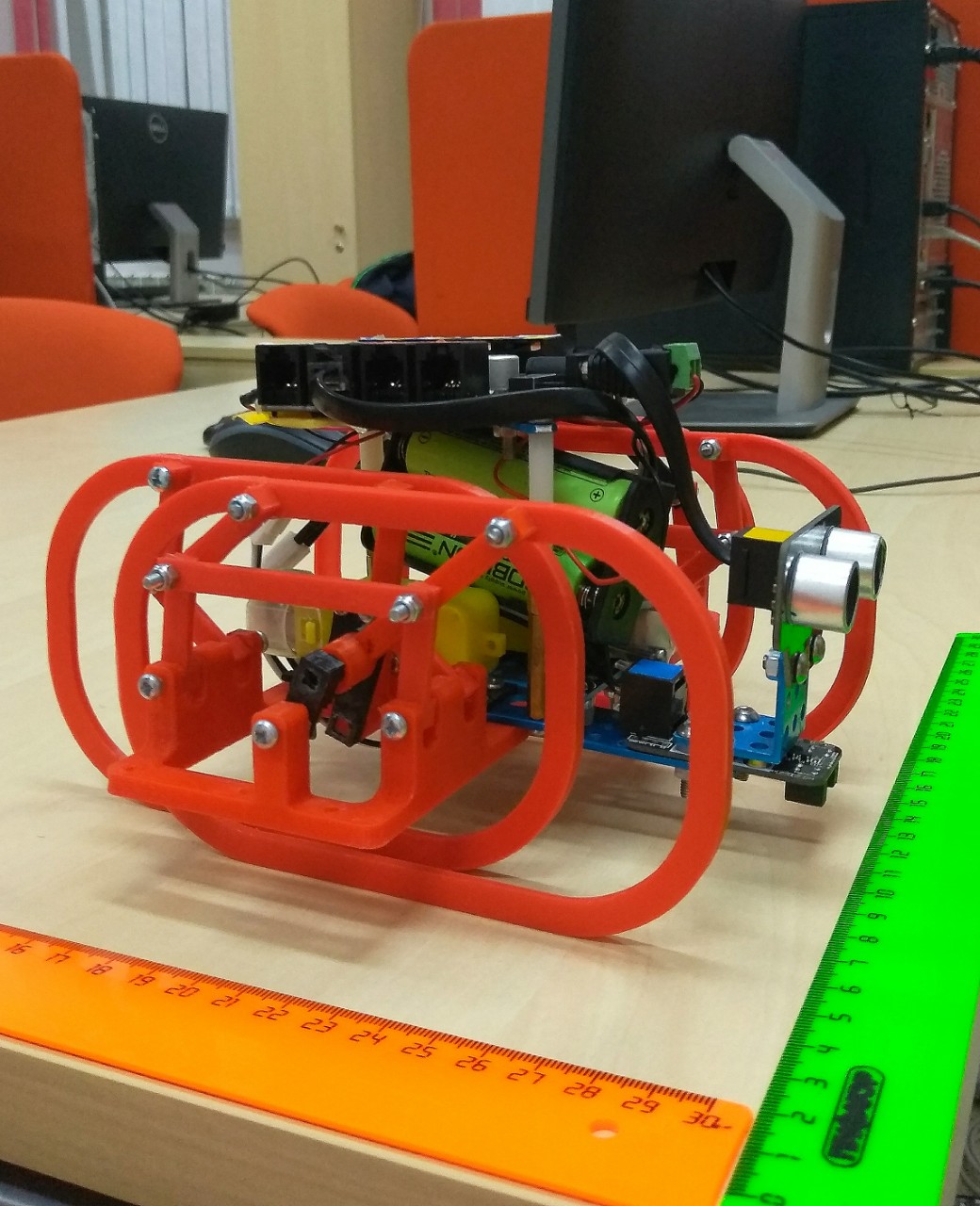
ROB-24499 Робот создан на платформе MakeBlock. Для
следования по линии используются два датчика цвета, для выполнения команды
«старт - финиш» - один датчик ультразвука. Длина робота – 23 см, ширина – 15
см, масса 500 гр. Платформа робота, а также детали
шагающего механизма разработаны в программе Autodesk Inventor (Pro) и
напечатаны на 3D принтере. Робот
соответствует предъявляемым требованиям. Робот полностью автономен.
Перемещается бегом, касаясь поверхности полигона только ногами – стопами.
Колеса в конструкции робота отсутствуют. В основе шагательного механизма
использован модифицированный лямбдаобразный механизм П.Л. Чебышева. Шагательный
механизм состоит из четырех ног – стоп, шарнирно-соединенных подвижными звеньями.
Траектория движения стоп – симметричная. Стопы ног робота не находятся выше
точки крепления их к телу робота. Робот может осуществлять движение как вперед,
так и назад, может осуществлять разворот на месте. Используемая конструкция
шагательного механизма позволяет обеспечивать равномерное поступательное
движение платформы, на которой она установлена. Платформа робота движется
прямолинейно. Программирование осуществлено в среде MakeBlock. Алгоритм
программы предусматривает движение робота по черной линии с помощью двух
датчиков цвета. При этом программа дополнена возможностью ускорения движения на
прямых участках трассы, а также использована система аварийного возвращения
робота на линию.
Файлы
Добавлен 20.11.2024
{kind=link}
Добавлен 20.11.2024
Дополнительные файлы
{kind=link}
Добавлен 20.11.2024