Фрэнк 3.0
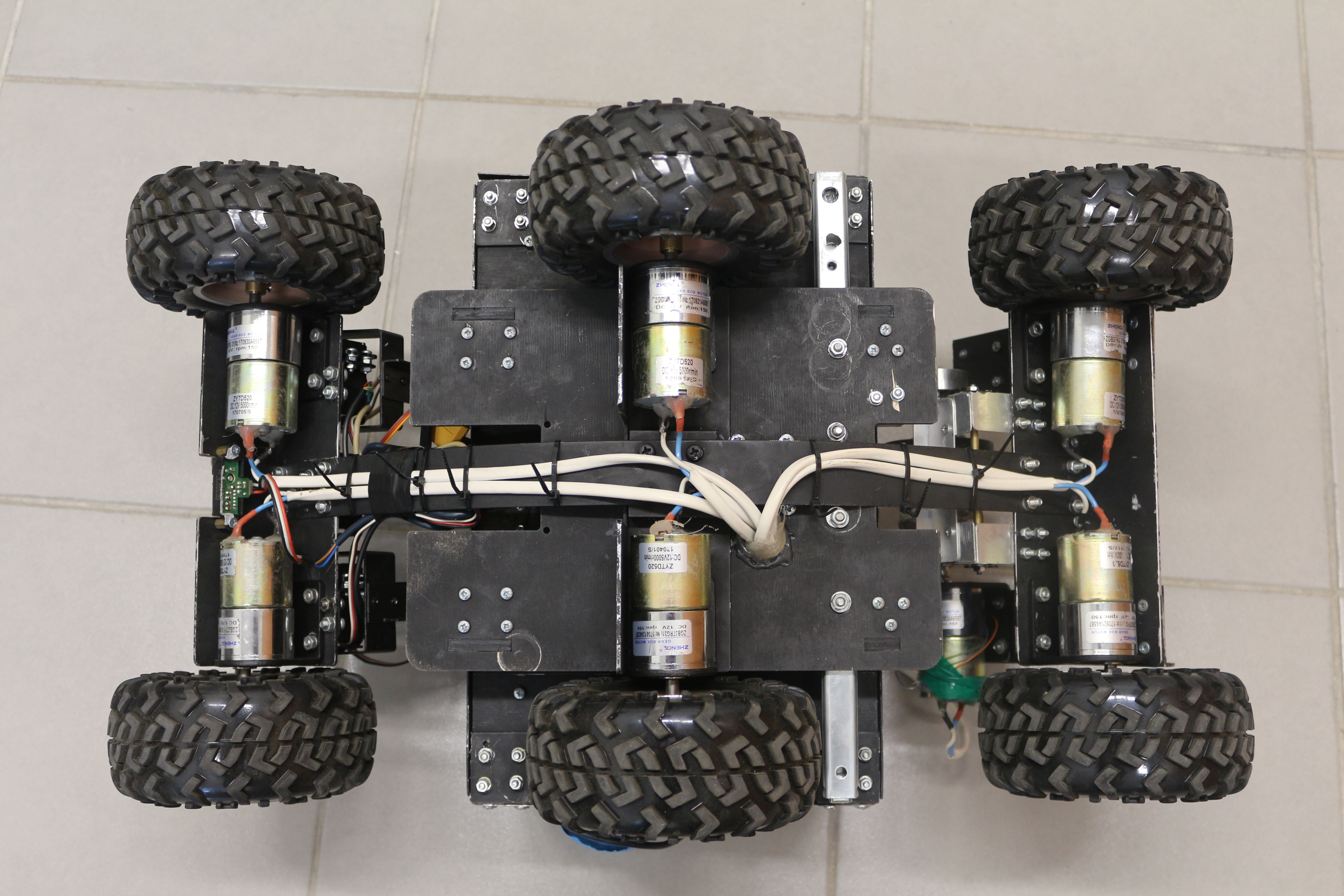
ROB-15426Робот представляет собой 6 колесную платформу, где колеса попарно соединены между собой и каждая пара двигается не зависимо от другой, что увеличивает проходимые свойства робота. В задней части робота находится лебёдка с помощью которой робот может автономно пройти участок с большой лестницей .Также робот оснащен системой переворота которая позволяет ему вернуться на колеса из любого положения. Она сделана на базе зубчатой рейки и направляющей. При опрокидывании, благодаря своему корпусу робот не получает повреждений и падает только на бок, а с этого положения рейка переворачивает его на колеса. Для взаимодействия с внешними объектами у робота есть манипулятор и инфракрасный дальномер для автономного захвата маячка , а для прохождения линии у робота есть 4 датчика (оптопары ). Робот управляется дистанционно при помощи пульта управления и видеосвязи от камеры, установленной на нем. Робот работает под управлением Arduino Mega . По сравнению с прошлой конструкцией был собран полностью новый робот .Размеры робота д55 см,ш30 см,в31 см
Дополнительные файлы
{kind=link}
Добавлен 20.11.2024
{kind=link}
Добавлен 20.11.2024